#include <iostream>
#include <Windows.h>
#include <vector>
#pragma comment(lib,"user32.lib")
#pragma comment(lib,"advapi32.lib")
#define IOCTL_IO_Msg 0x800
#define IOCTL_IO_TEST 0x801
#define IOCTL_IO_Array 0x802
#define IOCTL_IO_STRUCT 0x803
#define IOCTL_IO_String 0x804
class cDrvCtrl
{
public:
cDrvCtrl()
{
m_pSysPath = NULL;
m_pServiceName = NULL;
m_pDisplayName = NULL;
m_hSCManager = NULL;
m_hService = NULL;
m_hDriver = INVALID_HANDLE_VALUE;
}
~cDrvCtrl()
{
CloseServiceHandle(m_hService);
CloseServiceHandle(m_hSCManager);
CloseHandle(m_hDriver);
}
BOOL Install(PCHAR pSysPath, PCHAR pServiceName, PCHAR pDisplayName)
{
m_pSysPath = pSysPath;
m_pServiceName = pServiceName;
m_pDisplayName = pDisplayName;
m_hSCManager = OpenSCManagerA(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == m_hSCManager)
{
m_dwLastError = GetLastError();
return FALSE;
}
m_hService = CreateServiceA(m_hSCManager, m_pServiceName, m_pDisplayName,
SERVICE_ALL_ACCESS, SERVICE_KERNEL_DRIVER, SERVICE_DEMAND_START, SERVICE_ERROR_NORMAL,
m_pSysPath, NULL, NULL, NULL, NULL, NULL);
if (NULL == m_hService)
{
m_dwLastError = GetLastError();
if (ERROR_SERVICE_EXISTS == m_dwLastError)
{
m_hService = OpenServiceA(m_hSCManager, m_pServiceName, SERVICE_ALL_ACCESS);
if (NULL == m_hService)
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
}
else
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
}
return TRUE;
}
BOOL Start()
{
if (!StartServiceA(m_hService, NULL, NULL))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
BOOL Stop()
{
SERVICE_STATUS ss;
GetSvcHandle(m_pServiceName);
if (!ControlService(m_hService, SERVICE_CONTROL_STOP, &ss))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
BOOL Remove()
{
GetSvcHandle(m_pServiceName);
if (!DeleteService(m_hService))
{
m_dwLastError = GetLastError();
return FALSE;
}
return TRUE;
}
BOOL Open(PCHAR pLinkName)
{
if (m_hDriver != INVALID_HANDLE_VALUE)
return TRUE;
m_hDriver = CreateFileA(pLinkName, GENERIC_READ | GENERIC_WRITE, 0, 0, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, 0);
if (m_hDriver != INVALID_HANDLE_VALUE)
return TRUE;
else
return FALSE;
}
BOOL IoControl(DWORD dwIoCode, PVOID InBuff, DWORD InBuffLen, PVOID OutBuff, DWORD OutBuffLen, DWORD *RealRetBytes)
{
DWORD dw;
BOOL b = DeviceIoControl(m_hDriver, CTL_CODE_GEN(dwIoCode), InBuff, InBuffLen, OutBuff, OutBuffLen, &dw, NULL);
if (RealRetBytes)
*RealRetBytes = dw;
return b;
}
private:
BOOL GetSvcHandle(PCHAR pServiceName)
{
m_pServiceName = pServiceName;
m_hSCManager = OpenSCManagerA(NULL, NULL, SC_MANAGER_ALL_ACCESS);
if (NULL == m_hSCManager)
{
m_dwLastError = GetLastError();
return FALSE;
}
m_hService = OpenServiceA(m_hSCManager, m_pServiceName, SERVICE_ALL_ACCESS);
if (NULL == m_hService)
{
CloseServiceHandle(m_hSCManager);
return FALSE;
}
else
{
return TRUE;
}
}
DWORD CTL_CODE_GEN(DWORD lngFunction)
{
return (FILE_DEVICE_UNKNOWN * 65536) | (FILE_ANY_ACCESS * 16384) | (lngFunction * 4) | METHOD_BUFFERED;
}
public:
DWORD m_dwLastError;
PCHAR m_pSysPath;
PCHAR m_pServiceName;
PCHAR m_pDisplayName;
HANDLE m_hDriver;
SC_HANDLE m_hSCManager;
SC_HANDLE m_hService;
};
void GetAppPath(char *szCurFile)
{
GetModuleFileNameA(0, szCurFile, MAX_PATH);
for (SIZE_T i = strlen(szCurFile) - 1; i >= 0; i--)
{
if (szCurFile[i] == '\\')
{
szCurFile[i + 1] = '\0';
break;
}
}
}
typedef struct
{
int uuid;
char szUname[1024];
}MyData;
int main(int argc, char *argv[])
{
cDrvCtrl DriveControl;
char szSysFile[MAX_PATH] = { 0 };
char szSvcLnkName[] = "WinDDK";;
GetAppPath(szSysFile);
strcat(szSysFile, "WinDDK.sys");
DriveControl.Install(szSysFile, szSvcLnkName, szSvcLnkName);
DriveControl.Start();
DriveControl.Open("\\\\.\\WinDDK");
DriveControl.IoControl(IOCTL_IO_Msg, 0, 0, 0, 0, 0);
DWORD input = 100, output = 0, ref_len = 0;
DriveControl.IoControl(IOCTL_IO_TEST, &input, sizeof(input), &output, sizeof(output), &ref_len);
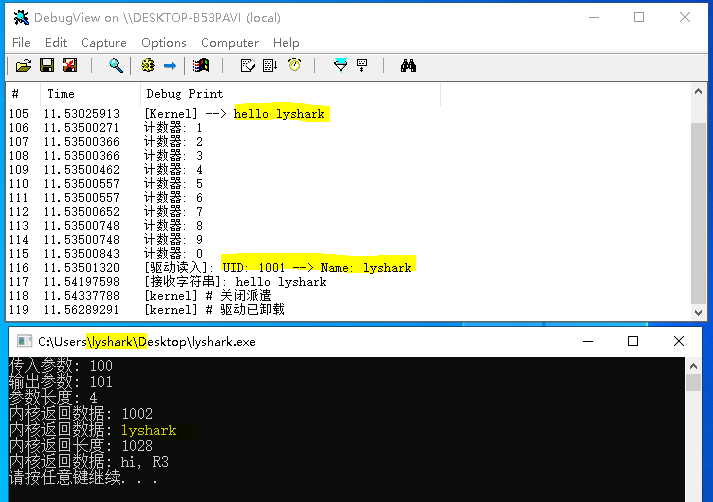
std::cout << "传入参数: " << input << std::endl;
std::cout << "输出参数: " << output << std::endl;
std::cout << "参数长度: " << ref_len << std::endl;
int MyArray[10] = { 1, 2, 3, 4, 5, 6, 7, 8, 9, 0 };
int array_count = 10 * sizeof(int);
DriveControl.IoControl(IOCTL_IO_Array, &MyArray, array_count, 0, 0, 0);
MyData send_ptr, recv_ptr;
DWORD dwSize = 0;
memset(send_ptr.szUname, 0, 1024);
memset(recv_ptr.szUname, 0, 1024);
send_ptr.uuid = 1001;
strcpy(send_ptr.szUname, "lyshark");
DriveControl.IoControl(IOCTL_IO_STRUCT, &send_ptr, sizeof(send_ptr), &recv_ptr, sizeof(recv_ptr), &dwSize);
std::cout << "内核返回数据: " << recv_ptr.uuid << std::endl;
std::cout << "内核返回数据: " << recv_ptr.szUname << std::endl;
std::cout << "内核返回长度: " << dwSize << std::endl;
char szString[256] = { 0 };
char szRecvPtr[256] = { 0 };
strcpy(szString, "hello lyshark");
DriveControl.IoControl(IOCTL_IO_String, &szString, sizeof(szString), &szRecvPtr, sizeof(szRecvPtr), &dwSize);
std::cout << "内核返回数据: " << szRecvPtr << std::endl;
CloseHandle(DriveControl.m_hDriver);
DriveControl.Stop();
DriveControl.Remove();
system("pause");
return 0;
}
|