#define BOOST_BIND_GLOBAL_PLACEHOLDERS
#include <iostream>
#include <string>
#include <boost/asio.hpp>
#include <boost/bind.hpp>
#include <boost/date_time/posix_time/posix_time_types.hpp>
#include <boost/format.hpp>
#include <boost/lexical_cast.hpp>
#include <boost/algorithm/string.hpp>
#include <boost/program_options.hpp>
#include <boost/bind.hpp>
#include <boost/thread.hpp>
#include <boost/function.hpp>
#include <boost/thread/thread_guard.hpp>
using namespace std;
using namespace boost;
using boost::asio::ip::tcp;
namespace opt = boost::program_options;
boost::mutex io_mutex;
void ShowOpt()
{
fprintf(stderr,
"# # # \n"
"# # # \n"
"# # # ##### ###### ###### # ### # ## \n"
"# # # # # # # # ## # # \n"
"# # # #### # # # # # ### \n"
"# ##### # # # # ## # # # \n"
"##### # ##### # # #### # # # ## \n\n"
);
}
class AsyncConnect
{
public:
AsyncConnect(boost::asio::io_service& ios, tcp::socket &s)
:io_service_(ios), timer_(ios), socket_(s) {}
bool aysnc_connect(const tcp::endpoint &ep, int million_seconds)
{
bool connect_success = false;
socket_.async_connect(ep, boost::bind(&AsyncConnect::connect_handle, this, _1, boost::ref(connect_success)));
timer_.expires_from_now(boost::posix_time::milliseconds(million_seconds));
bool timeout = false;
timer_.async_wait(boost::bind(&AsyncConnect::timer_handle, this, _1, boost::ref(timeout)));
do
{
io_service_.run_one();
} while (!timeout && !connect_success);
timer_.cancel();
return connect_success;
}
private:
void connect_handle(boost::system::error_code ec, bool &connect_success)
{
if (!ec)
{
connect_success = true;
}
}
void timer_handle(boost::system::error_code ec, bool &timeout)
{
if (!ec)
{
socket_.close();
timeout = true;
}
}
boost::asio::io_service &io_service_;
boost::asio::deadline_timer timer_;
tcp::socket &socket_;
};
bool PortScan(std::string address, int port, int timeout)
{
try
{
boost::asio::io_service io;
tcp::socket socket(io);
AsyncConnect acHandler(io, socket);
tcp::endpoint ep(boost::asio::ip::address::from_string(address), port);
if (acHandler.aysnc_connect(ep, timeout))
{
io.run();
return true;
}
else
{
return false;
}
}
catch (...)
{
return false;
}
}
bool CalculationAddress(std::string address, std::vector<std::string> &ref)
{
std::vector<std::string> vect;
try
{
boost::split(vect, address, boost::is_any_of("/") || boost::is_any_of("."), boost::token_compress_on);
int start_count = lexical_cast<int>(vect[3]);
int end_count = lexical_cast<int>(vect[4]);
if (end_count <= 255)
{
for (int x = start_count; x <= end_count; x++)
{
std::string this_address = boost::str(boost::format("%s.%s.%s.%s") % vect[0] % vect[1] % vect[2] % x);
ref.push_back(this_address);
}
}
else
{
return false;
}
}
catch (...)
{
return false;
}
return true;
}
bool CalculationPort(std::string port_string, std::vector<int> &ref)
{
std::vector<std::string> vect;
try
{
boost::split(vect, port_string, boost::is_any_of(","), boost::token_compress_on);
for (int x = 0; x < vect.size(); x++)
{
ref.push_back(lexical_cast<int>(vect[x]));
}
return true;
}
catch (...)
{
return false;
}
return true;
}
void MyThread(std::string address, int port)
{
bool is_open = PortScan(address, port, 1000);
boost::lock_guard<boost::mutex> global_mutex(io_mutex);
if (is_open == true)
{
std::cout << "扫描地址: " << address << " 扫描端口: " << port << " 扫描状态: 开放" << std::endl;
}
else
{
std::cout << "扫描地址: " << address << " 扫描端口: " << port << " 扫描状态: 关闭" << std::endl;
}
}
void MyThreadB(std::string address, int port)
{
bool is_open = PortScan(address, port, 1000);
boost::lock_guard<boost::mutex> global_mutex(io_mutex);
if (is_open == true)
{
std::cout << "扫描地址: " << address << " 扫描端口: " << port << " 扫描状态: 开放" << std::endl;
}
}
int main(int argc, char * argv[])
{
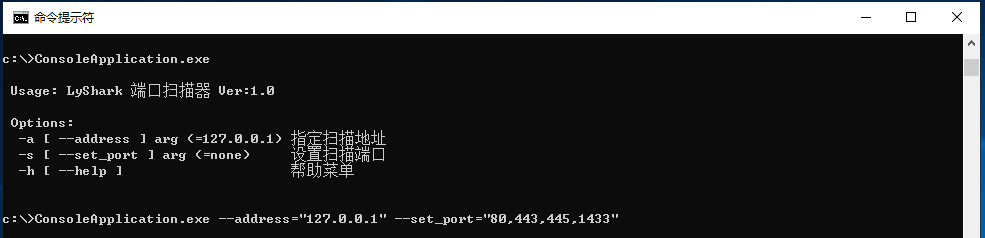
opt::options_description des_cmd("\n Usage: LyShark 端口扫描器 Ver:1.1 \n\n Options");
des_cmd.add_options()
("address,a", opt::value<std::string>(), "指定扫描地址 192.168.1.1")
("c_address,c", opt::value<std::string>(), "设置扫描C地址段 192.168.1.1/24")
("set_port,s", opt::value<std::string>(), "设置扫描端口 80,443,135,139")
("type,t", opt::value<std::string>(), "对特定主机 扫描 1-65535 全端口")
("help,h", "帮助菜单");
opt::variables_map virtual_map;
try
{
opt::store(opt::parse_command_line(argc, argv, des_cmd), virtual_map);
}
catch (...){ return 0; }
opt::notify(virtual_map);
if (virtual_map.empty())
{
ShowOpt();
std::cout << des_cmd << std::endl;
return 0;
}
else if (virtual_map.count("help") || virtual_map.count("h"))
{
ShowOpt();
std::cout << des_cmd << std::endl;
return 0;
}
else if (virtual_map.count("address") && virtual_map.count("type"))
{
std::string address = virtual_map["address"].as<std::string>();
std::string type = virtual_map["type"].as<std::string>();
if (address.length() != 0 && type == "all")
{
boost::thread_group group;
for (int x = 0; x < 65534; x++)
{
group.create_thread(boost::bind(MyThreadB, address, x));
_sleep(50);
}
group.join_all();
}
}
else if (virtual_map.count("address") && virtual_map.count("set_port"))
{
std::string address = virtual_map["address"].as<std::string>();
std::string set_port = virtual_map["set_port"].as<std::string>();
std::vector<int> scan_port_list;
bool scan_ref = CalculationPort(set_port, scan_port_list);
if (scan_ref == true)
{
boost::thread_group group;
for (int x = 0; x < scan_port_list.size(); x++)
{
group.create_thread(boost::bind(MyThread, address, scan_port_list[x]));
}
group.join_all();
}
}
else if (virtual_map.count("c_address") && virtual_map.count("set_port"))
{
std::string c_address = virtual_map["c_address"].as < std::string >();
std::string set_port = virtual_map["set_port"].as<std::string>();
std::vector<int> scan_port_list;
bool scan_port_ref = CalculationPort(set_port, scan_port_list);
std::vector < std::string > scan_address_list;
bool scan_address_ref = CalculationAddress(c_address, scan_address_list);
if (scan_port_ref == true && scan_address_ref == true)
{
for (int x = 0; x < scan_address_list.size(); x++)
{
boost::thread_group group;
for (int y = 0; y < scan_port_list.size(); y++)
{
group.create_thread(boost::bind(MyThreadB, scan_address_list[x], scan_port_list[y]));
}
group.join_all();
}
}
}
else
{
std::cout << "参数错误" << std::endl;
}
return 0;
}
|