在笔者上一篇文章《内核枚举LoadImage映像回调》中LyShark教大家实现了枚举系统回调中的LoadImage通知消息,本章将实现对Registry注册表通知消息的枚举,与LoadImage消息不同Registry消息不需要解密只要找到CallbackListHead消息回调链表头并解析为_CM_NOTIFY_ENTRY结构即可实现枚举。
Registry注册表回调是Windows操作系统提供的一种机制,它允许开发者在注册表发生变化时拦截并修改注册表的操作。Registry注册表回调是通过操作系统提供的注册表回调机制来实现的。
当应用程序或系统服务对注册表进行读写操作时,操作系统会触发注册表回调事件,然后在注册表回调事件中调用注册的Registry注册表回调函数。开发者可以在Registry注册表回调函数中执行自定义的逻辑,例如记录日志,过滤敏感数据,或者阻止某些操作。
Registry注册表回调可以通过操作系统提供的注册表回调函数CmRegisterCallback和CmUnRegisterCallback来进行注册和注销。同时,Registry注册表回调函数需要遵守一定的约束条件,例如不能在回调函数中对注册表进行修改,不能调用一些内核API函数等。
Registry注册表回调在安全软件、系统监控和调试工具等领域有着广泛的应用。
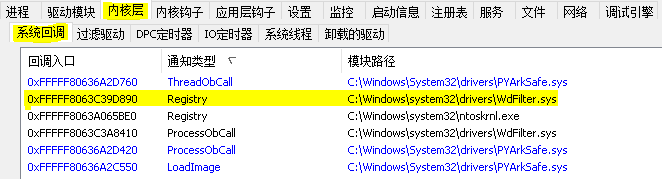
我们来看一款闭源ARK工具是如何实现的:
注册表系统回调的枚举需要通过特征码搜索来实现,首先我们可以定位到uf CmUnRegisterCallback内核函数上,在该内核函数下方存在一个CallbackListHead链表节点,取出这个链表地址。
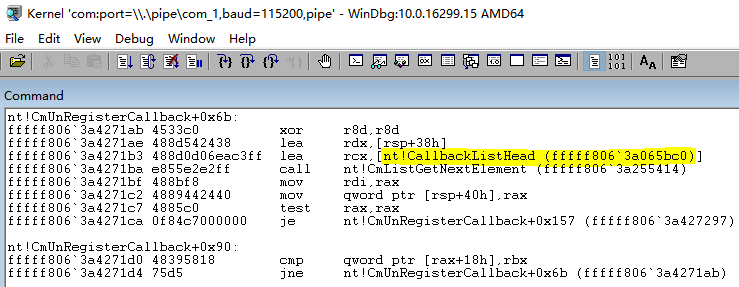
当得到注册表链表入口0xfffff8063a065bc0直接将其解析为_CM_NOTIFY_ENTRY即可得到数据,如果要遍历下一个链表则只需要ListEntryHead.Flink向下移动指针即可。
typedef struct _CM_NOTIFY_ENTRY
{
LIST_ENTRY ListEntryHead;
ULONG UnKnown1;
ULONG UnKnown2;
LARGE_INTEGER Cookie;
PVOID Context;
PVOID Function;
}CM_NOTIFY_ENTRY, *PCM_NOTIFY_ENTRY;
|
要想得到此处的链表地址,需要先通过MmGetSystemRoutineAddress()获取到CmUnRegisterCallback函数基址,然后在该函数起始位置向下搜索,找到这个链表节点,并将其后面的基地址取出来,在上一篇《内核枚举LoadImage映像回调》文章中已经介绍了定位方式此处跳过介绍,具体实现代码如下。
#include <ntifs.h>
#include <windef.h>
PVOID SearchMemory(PVOID pStartAddress, PVOID pEndAddress, PUCHAR pMemoryData, ULONG ulMemoryDataSize)
{
PVOID pAddress = NULL;
PUCHAR i = NULL;
ULONG m = 0;
for (i = (PUCHAR)pStartAddress; i < (PUCHAR)pEndAddress; i++)
{
for (m = 0; m < ulMemoryDataSize; m++)
{
if (*(PUCHAR)(i + m) != pMemoryData[m])
{
break;
}
}
if (m >= ulMemoryDataSize)
{
pAddress = (PVOID)(i + ulMemoryDataSize);
break;
}
}
return pAddress;
}
PVOID SearchCallbackListHead(PUCHAR pSpecialData, ULONG ulSpecialDataSize, LONG lSpecialOffset)
{
UNICODE_STRING ustrFuncName;
PVOID pAddress = NULL;
LONG lOffset = 0;
PVOID pCmUnRegisterCallback = NULL;
PVOID pCallbackListHead = NULL;
RtlInitUnicodeString(&ustrFuncName, L"CmUnRegisterCallback");
pCmUnRegisterCallback = MmGetSystemRoutineAddress(&ustrFuncName);
if (NULL == pCmUnRegisterCallback)
{
return pCallbackListHead;
}
pAddress = SearchMemory(pCmUnRegisterCallback, (PVOID)((PUCHAR)pCmUnRegisterCallback + 0xFF), pSpecialData, ulSpecialDataSize);
if (NULL == pAddress)
{
return pCallbackListHead;
}
lOffset = *(PLONG)((PUCHAR)pAddress + lSpecialOffset);
pCallbackListHead = (PVOID)((PUCHAR)pAddress + lSpecialOffset + sizeof(LONG) + lOffset);
return pCallbackListHead;
}
VOID UnDriver(PDRIVER_OBJECT Driver)
{
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
PVOID pCallbackListHeadAddress = NULL;
RTL_OSVERSIONINFOW osInfo = { 0 };
UCHAR pSpecialData[50] = { 0 };
ULONG ulSpecialDataSize = 0;
LONG lSpecialOffset = 0;
DbgPrint("hello lyshark.com \n");
pSpecialData[0] = 0x48;
pSpecialData[1] = 0x8D;
pSpecialData[2] = 0x0D;
ulSpecialDataSize = 3;
pCallbackListHeadAddress = SearchCallbackListHead(pSpecialData, ulSpecialDataSize, lSpecialOffset);
DbgPrint("[LyShark.com] CallbackListHead => %p \n", pCallbackListHeadAddress);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
|
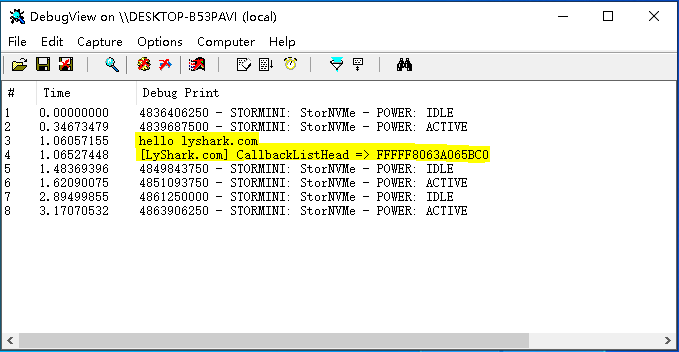
运行这段代码,并可得到注册表回调入口地址,输出效果如下所示:
得到了注册表回调入口地址,接着直接循环遍历输出这个链表即可得到所有的注册表回调。
#include <ntifs.h>
#include <windef.h>
PVOID SearchMemory(PVOID pStartAddress, PVOID pEndAddress, PUCHAR pMemoryData, ULONG ulMemoryDataSize)
{
PVOID pAddress = NULL;
PUCHAR i = NULL;
ULONG m = 0;
for (i = (PUCHAR)pStartAddress; i < (PUCHAR)pEndAddress; i++)
{
for (m = 0; m < ulMemoryDataSize; m++)
{
if (*(PUCHAR)(i + m) != pMemoryData[m])
{
break;
}
}
if (m >= ulMemoryDataSize)
{
pAddress = (PVOID)(i + ulMemoryDataSize);
break;
}
}
return pAddress;
}
PVOID SearchCallbackListHead(PUCHAR pSpecialData, ULONG ulSpecialDataSize, LONG lSpecialOffset)
{
UNICODE_STRING ustrFuncName;
PVOID pAddress = NULL;
LONG lOffset = 0;
PVOID pCmUnRegisterCallback = NULL;
PVOID pCallbackListHead = NULL;
RtlInitUnicodeString(&ustrFuncName, L"CmUnRegisterCallback");
pCmUnRegisterCallback = MmGetSystemRoutineAddress(&ustrFuncName);
if (NULL == pCmUnRegisterCallback)
{
return pCallbackListHead;
}
pAddress = SearchMemory(pCmUnRegisterCallback, (PVOID)((PUCHAR)pCmUnRegisterCallback + 0xFF), pSpecialData, ulSpecialDataSize);
if (NULL == pAddress)
{
return pCallbackListHead;
}
lOffset = *(PLONG)((PUCHAR)pAddress + lSpecialOffset);
pCallbackListHead = (PVOID)((PUCHAR)pAddress + lSpecialOffset + sizeof(LONG) + lOffset);
return pCallbackListHead;
}
typedef struct _CM_NOTIFY_ENTRY
{
LIST_ENTRY ListEntryHead;
ULONG UnKnown1;
ULONG UnKnown2;
LARGE_INTEGER Cookie;
PVOID Context;
PVOID Function;
}CM_NOTIFY_ENTRY, *PCM_NOTIFY_ENTRY;
VOID UnDriver(PDRIVER_OBJECT Driver)
{
}
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{
PVOID pCallbackListHeadAddress = NULL;
RTL_OSVERSIONINFOW osInfo = { 0 };
UCHAR pSpecialData[50] = { 0 };
ULONG ulSpecialDataSize = 0;
LONG lSpecialOffset = 0;
DbgPrint("hello lyshark.com \n");
pSpecialData[0] = 0x48;
pSpecialData[1] = 0x8D;
pSpecialData[2] = 0x0D;
ulSpecialDataSize = 3;
pCallbackListHeadAddress = SearchCallbackListHead(pSpecialData, ulSpecialDataSize, lSpecialOffset);
DbgPrint("[LyShark.com] CallbackListHead => %p \n", pCallbackListHeadAddress);
ULONG i = 0;
PCM_NOTIFY_ENTRY pNotifyEntry = NULL;
if (NULL == pCallbackListHeadAddress)
{
return FALSE;
}
pNotifyEntry = (PCM_NOTIFY_ENTRY)pCallbackListHeadAddress;
do
{
if (FALSE == MmIsAddressValid(pNotifyEntry))
{
break;
}
if (MmIsAddressValid(pNotifyEntry->Function))
{
DbgPrint("[LyShark.com] 回调函数地址: 0x%p | 回调函数Cookie: 0x%I64X \n", pNotifyEntry->Function, pNotifyEntry->Cookie.QuadPart);
}
pNotifyEntry = (PCM_NOTIFY_ENTRY)pNotifyEntry->ListEntryHead.Flink;
} while (pCallbackListHeadAddress != (PVOID)pNotifyEntry);
Driver->DriverUnload = UnDriver;
return STATUS_SUCCESS;
}
|
最终运行这个驱动程序,输出如下效果:
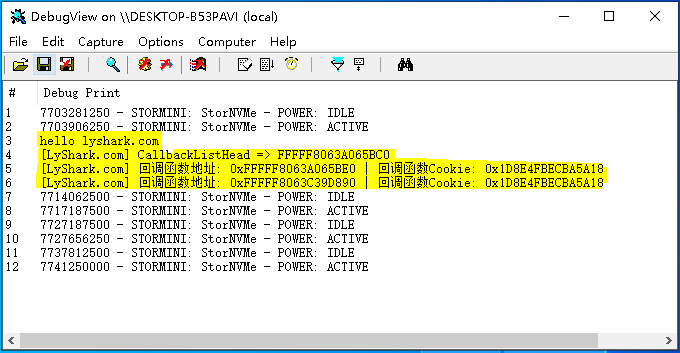
目前系统中有两个回调函数,这一点在第一张图片中也可以得到,枚举是正确的。